EN
EN AR
AR
 BG
BG
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 IT
IT
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LT
LT
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 ET
ET
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 GA
GA
 IS
IS
 HY
HY
 AZ
AZ
 KA
KA


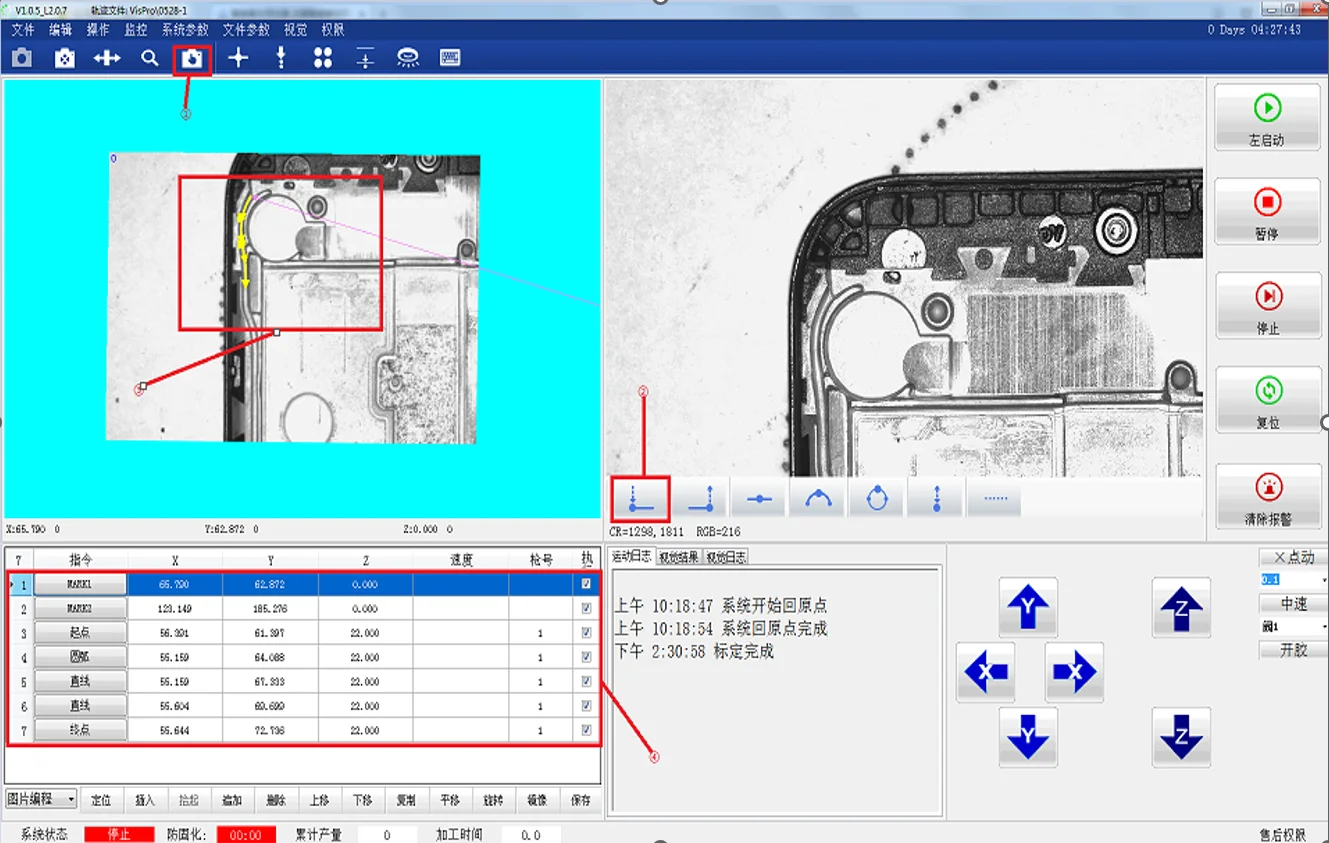




1. Prend en charge plusieurs méthodes de positionnement et de correction visuels, notamment le positionnement simple par repère (MARK), le positionnement double par repère (MARK), le positionnement triple par repère (MARK) et le positionnement dans une zone locale ;
2. Prend en charge diverses fonctions de vision, telles que l’appariement de formes, l’appariement de cercles, la détection de cartes manquantes, la détection de points flottants et la capture d’images en temps réel.