№ |
Კომპონენტის სახელი |
Ინდექსის სახელი |
Დეტალური ინდიკატორის აღწერა |
1 |
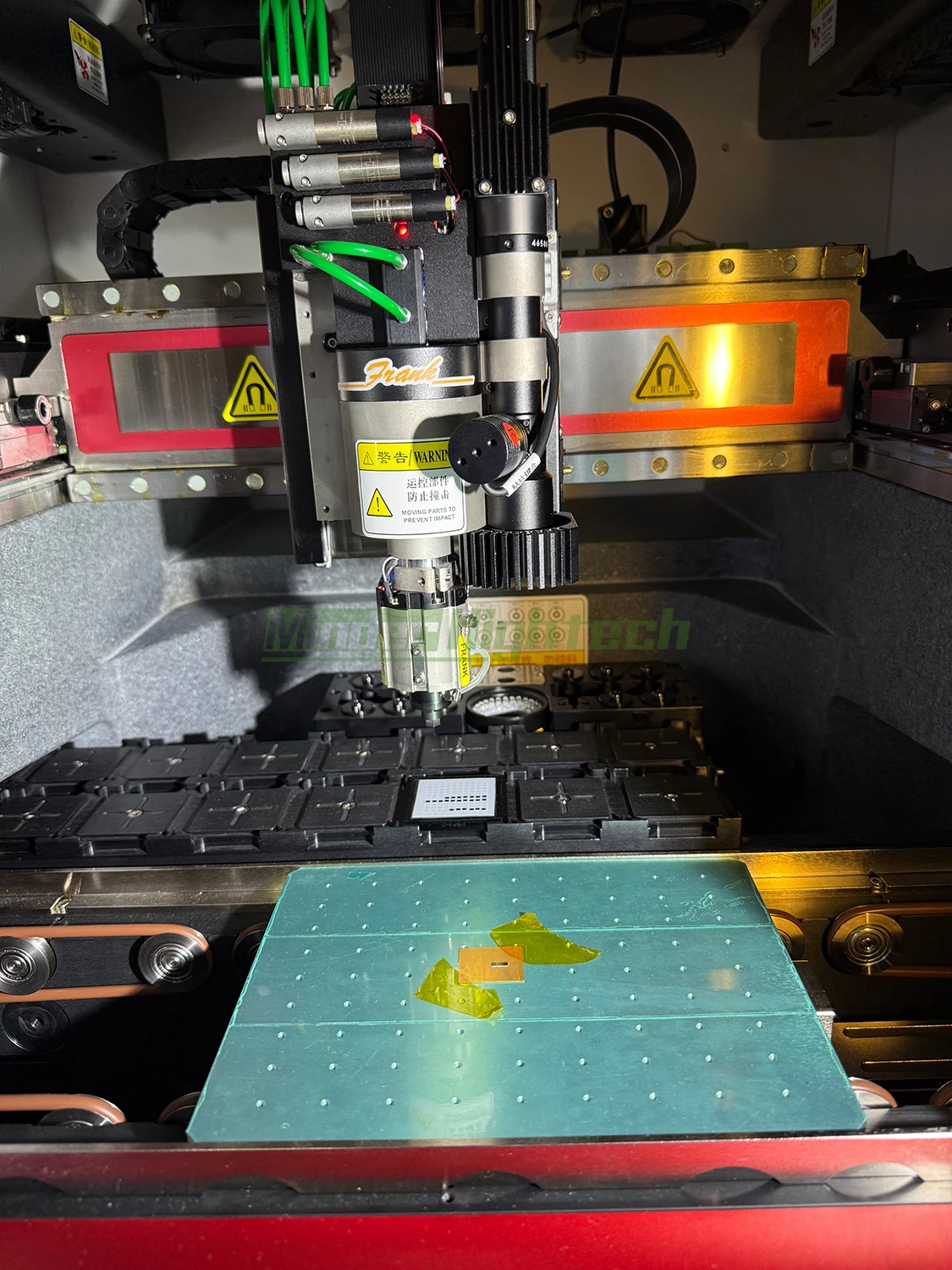
Მოძრაობის პლატფორმა |
Მოძრაობის განსხვავება |
XYZ-250mm*320mm*50mm |
Დაყოფილი პროდუქციის ზომები |
XYZ-200mm*170mm*50mm |
||
Გადაადგილების გარკვეულება |
XYZ-0.05μm |
||
Განმეორებითი პოზიციონირების სიზუსტე |
XY ღერძები: ±2μm@3S Z ღერძი: ±0.3μm |
||
XY ღერძების მაქსიმალური სიჩქარე |
XYZ=1m/s |
||
Ლიმიტის ფუნქცია |
Ელექტრონული მỀკვრავი ლიმიტი + ფიზიკური ლიმიტი |
||
Როტაციის ღერძი θ-ის როტაციის დიაპაზონი |
±360° |
||
Როტაციის გამოსახულება როტაციის ღერძით θ |
0.001° |
||
Გამოკვლის სიმაღლის მეთოდი და ზუსტება |
Მექანიკური სიმაღლის გამოსახულება, 1μm |
||
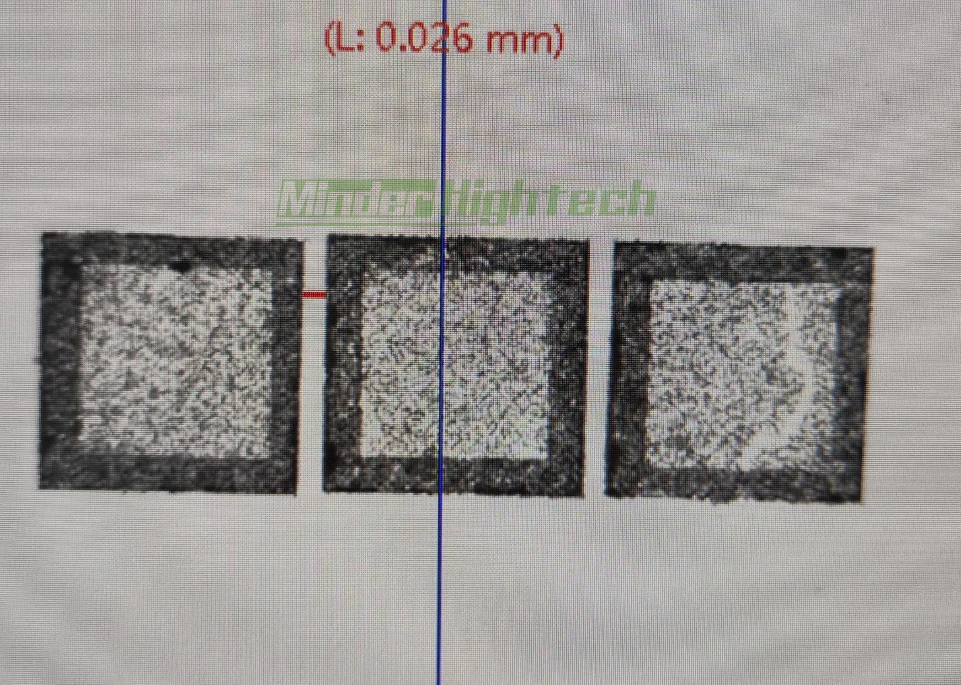
Სრული ზუსტება პატჩზე |
Პატჩის ზუსტება ±3μm@3S Კუთხის ზუსტება ±0.001°@3S |
||
2 |
Სილახის კონტროლური სისტემა |
Წნევის დიაპაზონი და გარჩევა |
5~1500გ, 0.1გ გარჩევა |
3 |
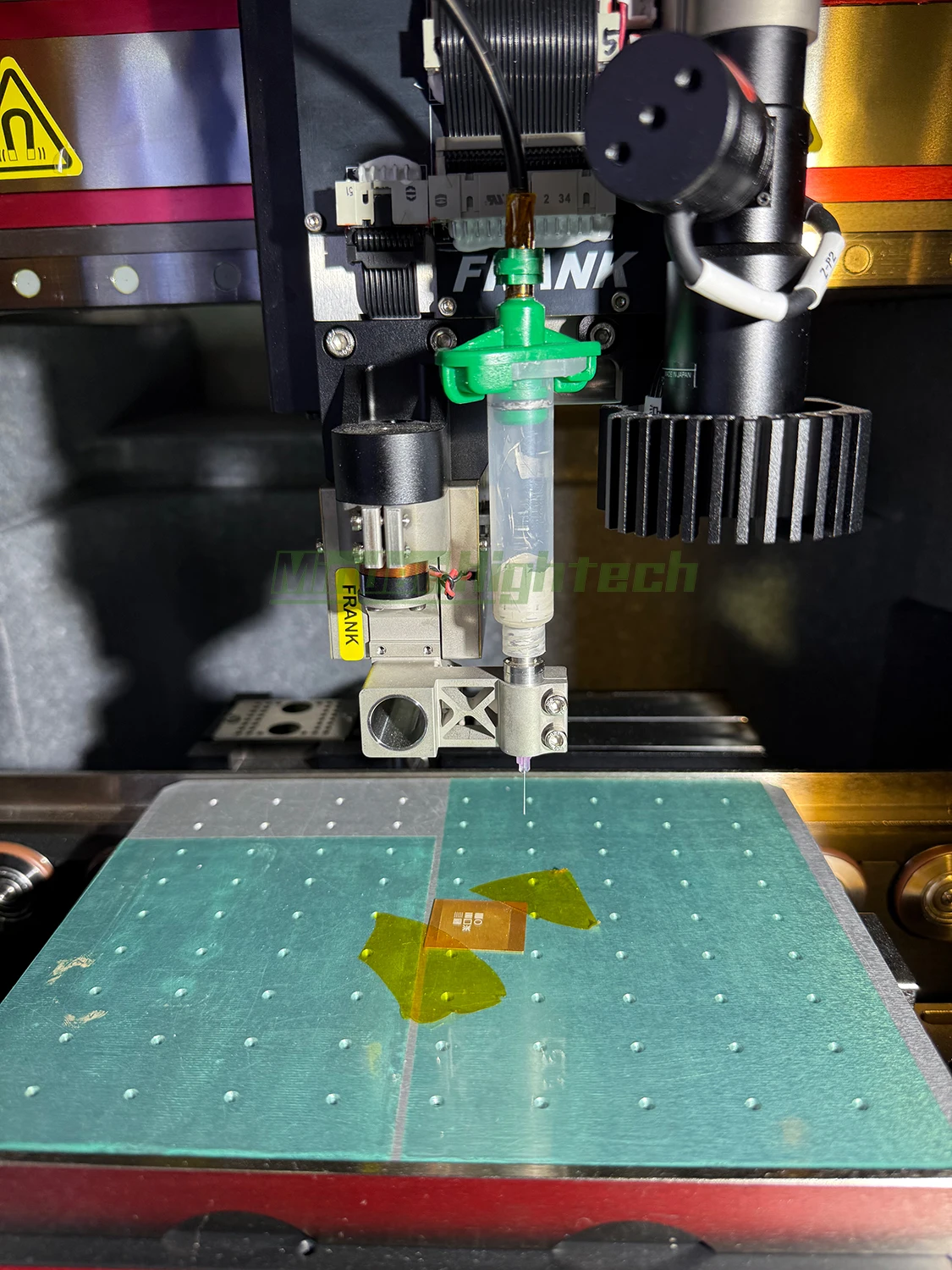
Ოპტიკური სისტემა |
Ძირითადი PR კამერა |
4.2მმ*3.7მმ შეხედვის ზონა, 500M პიქსელის მხარდაჭერი |
Უკანააღმოსავლელი კამერა |
4.2მმ*3.7მმ შეხედვის ზონა, 500M პიქსელის მხარდაჭერი |
||
4 |
Ნოზელის სისტემა |
Შეკვეცის მეთოდი |
Მაგნიტული + ვაკუუმი |
Ნოზელის შეცვლის რაოდენობა |
12 |
||
Ნოზელების ავტო-კალიბრაცია და ავტო-გადართვა |
Ონლაინ ავტომატური კალიბრების დახმარება, ავტომატური გადართვა |
||
Ნოზლის შემოწმების დაცულობა |
Მხარდაჭერა |
||
5 |
Კალიბრების სისტემა |
Უკანამდებარე კამერის კალიბრება Ნოზლის XYZ მიმართულების კალიბრება |
|
6 |
Ფუნქციონალური მახასიათებლები |
Პროგრამული საშუალების კომპატიბილიტე |
Პროდუქტის სურათები და ადგილის ინფორმაცია შეიძლება გააზიაროს დისპენსერის მაशინასთან |
Მეორე იდენტიფიკაცია |
Მოქმედი მეორე იდენტიფიკაციის ფუნქცია სუბსტრატებისთვის |
||
Მრავალსაფეხური მატრიცის ჩანერგვა |
Მრავალსიტყვიანი მატრიცის განსაზღვრადი ფუნქცია სუბსტრატებისთვის |
||
Მეორე ეკრანის ფუნქცია |
Ვიზუალურად შეგვიძლია ნახოთ მასალის წარმოების სტატუსის ინფორმაცია |
||
Ინდივიდუალური წერტილების გადართვა შეიძლება დაყოთ ნებისმიერად |
Შეიძლება ნებისმიერი კომპონენტის გადართვა და პარამეტრები მუშაობს მართვად |
||
CAD იმპორტის ფუნქციის მხარდაჭერა |
|||
Პროდუქტის გამჭრის სიღრმე |
12mm |
||
Სისტემის შეერთება |
SMEMA კომუნიკაციის მხარდაჭერა |
||
7 |
Პატჩ მოდული |
Საშუალება გაქვთ მისამართების სხვადასხვა სიმაღლეზე და კუთხეებზე |
|
Პროგრამა ავტომატურად გადართვის ჩანაწერებსა და კომპონენტებს შეცვლის |
|||
Ჩიპის აირჩევის პარამეტრები შეიძლება ცვლილი იყოს მომდევნოდ/ბატჩებში |
Ჩიპის აირჩევის პარამეტრები 娷ებს აირჩევამდე სიმაღლეს, აირჩევის სიჩქარეს, აირჩევის წნევას, ჩიპის აირჩევის სიმაღლეს, ჩიპის აირჩევის სიჩქარეს, ვაკუუმის დროსა და სხვა პარამეტრებს |
||
Ჩიპის დამაგრების პარამეტრები შეიძლება ცვლილი იყოს მომდევნოდ/ბატჩებში |
Ჩიპის დამაგრების პარამეტრები შეიცავს დამაგრებამდე სიმაღლეს, დამაგრებამდე მიდგომის სიჩქარეს, დამაგრების წნევას, დამაგრების სიმაღლეს, დამაგრების სიჩქარეს, ვაკუუმის დროს, უკან გადასაფარად დროსა და სხვა პარამეტრები |
||
Ჩიპის აირჩევის შემდეგ უკან გამოყოფა და კალიბრირება |
Ის შეძლებს ჩიპების უკან გამოყოფას ზომის დიაპაზონში 0.2-25 მილიმეტრში |
||
Ჩიპის მდებარეობის ცენტრის გადახრა |
Не болше чем ±3um@3S |
||
Პროდუქტიულობის ეფექტიულობა |
Не менее 1500 компонентов/час (взяв чип размером 0.5*0.5mm в качестве примера) |
||
8 |
Მასალების სისტემა |
-Compatible number of waffle boxes/gel boxes |
Стандарт 2*2 დიუმი 24 ნაწილი |
Каждое дно коробки можно откачивать под вакуум |
|||
Ვაკუუმის -platform can be customized |
Вакуумная область adsorption может достигать 200mm*170mm |
||
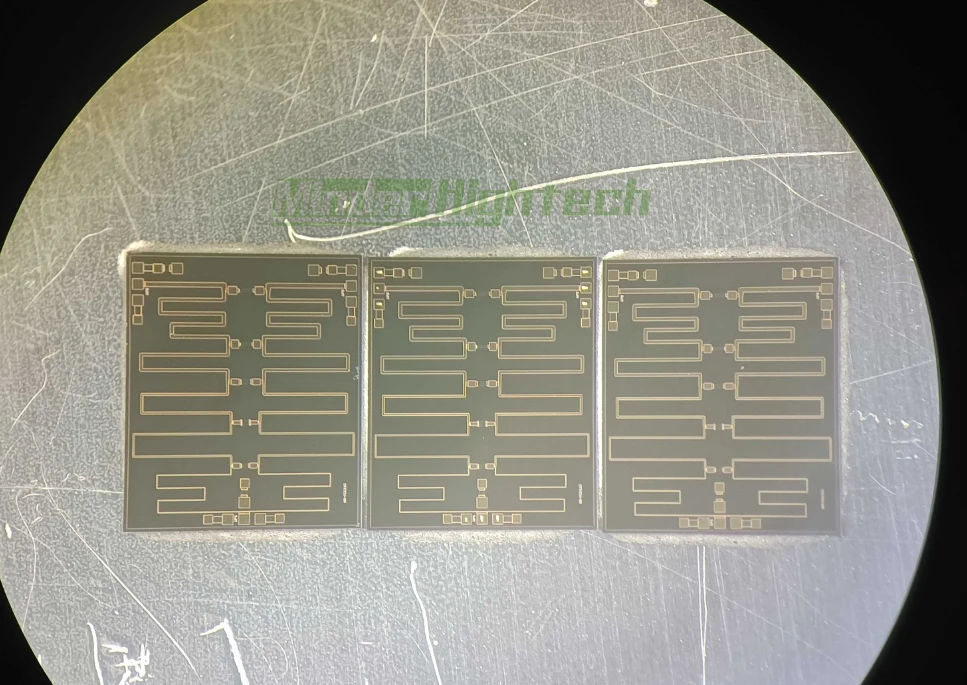
Საშუალებით ჩიპის ზომა |
Განსაკუთრებით დაerahvi ტიპის მიერ Ზომა: 0.2მმ-25მმ Სიღრმე: 30უმ-17მმ |
||
9 |
Აპარატურის უსაფრთხოება და გარემოს მოთხოვნები Ჰავას სისტემა |
Აპარატის ფორმა |
Სიგრძე*სიღრმე*სიმაღლე: 840*1220*2000მმ |
Აპარატის წონა |
760kg |
||
Ძაბვის მომარაგების ბლოკი |
220AC±10%@50Hz, 10A |
||
Ტემპერატურა და ტენიანობა |
Ტემპერატურა: 25℃±5℃ Ტყვის დონე: 30%RH~60%RH |
||
Სიხშირით დაჭერილი ჰავა (ან ალტერნატიურად აზოტის წყარო) |
Დაჭერვა >0.2Mpa, მოცულობა >5LPM, გამართლებული ჰავის წყარო |
||
Ვაკუუმი |
Დაჭერვა <-85Kpa, ჩანაწერის სიჩქარე >50LPM |
N0. |
Კომპონენტის სახელი |
Ინდექსის სახელი |
Დეტალური ინდიკატორის აღწერა |
1 |
Მოძრაობის პლატფორმა |
Მოძრაობის განსხვავება |
XYZ-250mm*320mm*50mm |
Მონაკვეთის ზომები |
XYZ-200mm*170mm*50mm |
||
Გადაადგილების გარკვეულება |
XYZ-0.05μm |
||
Განმეორებითი პოზიციონირების სიზუსტე |
XY ღერძები: ±2μm@3S Z ღერძი: ±0.3μm |
||
XY ღერძის მაქსიმალური მუშაობის სიჩქარე |
XYZ=1m/s |
||
Ლიმიტის ფუნქცია |
Ელექტრონული მỀკვრავი ლიმიტი + ფიზიკური ლიმიტი |
||
Როტაციის ღერძი θ-ის როტაციის დიაპაზონი |
±360° |
||
Როტაციის გამოსახულება როტაციის ღერძით θ |
0.001° |
||
Გამოკვლის სიმაღლის მეთოდი და ზუსტება |
Მექანიკური სიმაღლის განაკვეთი, 1უმ, ნებისმიერი წერტილის სიმაღლის განაკვეთი შეიძლება განსაზღვრონ; |
||
Საერთო გადასა ><?xml version="1.0" encoding="UTF-8"?> |
±3უმ@3S |
||
2 |
Გადასა |
Მინიმალური კლეის წერტილის დიამეტრი |
0.2mm (0.1mm დიამეტრის საჭიროებით) |
Განსხვავების რეჟიმი |
Წნევის-დროის რეჟიმი |
||
Მაღალ ზუსტობის გამოსცემის ქუჩა, კონტროლიруლი ვალვი, ავტომატური პოზიტიური/ნეგატიური გამოსცემის წნევის გარდაქმნა |
|||
Გამოსცემის ჰაერის წნევის დაყენების დიაპაზონი |
0.01-0.6MPa |
||
Ხელმისაწვდომია კლეის წერტილების ფუნქცია, და პარამეტრები შეიძლება განსაზღვრებული იყოს ნებისმიერად |
Პარამეტრები 娷ებს: გამოსცემის სიმაღლე, წინა გამოსცემის დრო, გამოსცემის დრო, წინა შეკრების დრო, გამოსცემის წნევა და სხვა პარამეტრები |
||
Ხელმისაწვდომია კლეის შეკრების ფუნქცია, და პარამეტრები შეიძლება განსაზღვრებული იყოს ნებისმიერად |
Პარამეტრები შემოწმებს: გამოსცემის სიმაღლე, წინა გამოსცემის დრო, კლეის სიჩქარე, წინა შეკრების დრო, კლეის წნევა და სხვა პარამეტრები |
||
Მაღალი საშუალება განაწილებისთვის |
Ის იქნება საშუალება გლიუს განაწილებისთვის განსხვავებულ სიმაღლეზე და გლიუს ტიპი შეიძლება გარკვეული კუთხით ჩრონდეს |
||
Გლიუს პერსონალიზებული გამოყოფა |
Გლიუს ბიბლიოთეკა შეიძლება გამოიძახოს და პერსონალიზებულად შეიცვალოს |
||
3 |
Მასალების სისტემა |
Ვაკუუმის -platform can be customized |
Ვაკუუმის აბსორბციის ფართობი მაქსიმალურად 200mm*170mm |
Გლიუს უპაკირება (სტანდარტული) |
5CC (თანამედროვანი 3CC-თან) |
||
Მარკირებული გლიუს თაფრი |
Შეიძლება იყენებოდეს პარამეტრების სიმაღლეზე წერტილების და გლიუს ხაზის რეჟიმში, გლიუს განაწილების წარმოებამდე წინა ხაზის გამოყოფისთვის |
||
4 |
Კალიბრების სისტემა |
Გლიუს ნელის კალიბრირება |
Კალიბრირება გლუტოს გადასვლის ნეელის XYZ მიმართულებაში |
5 |
Ოპტიკური სისტემა |
Ძირითადი PR კამერა |
4.2მმ*3.5მმ ხედი, 500M პიქსელი |
Იდენტიფიცირებს სუბსტრატს/კომპონენტს |
Ჩვეულებრივ იდენტიფიცირებს საერთო სუბსტრატებს და კომპონენტებს, ხოლო სპეციალური სუბსტრატები შეიძლება განახორციელონ იმით, რომ იყოს აღინიშნებული ფუნქცია |
||
6 |
Ფუნქციონალური მახასიათებლები |
Პროგრამული საშუალების კომპატიბილიტე |
Პროდუქტის სურათები და ადგილზე მყარი ინფორმაცია შეიძლება გააზიაროს პლეისმენტ მაशინასთან |
Ჩიპის მდებარეობის ცენტრის გადახრა |
Не болше чем ±3um@3S |
||
Პროდუქტიულობის ეფექტიულობა |
Არანაკლებ 1500 კომპონენტი/საათი (მაგალითად, 0.5*0.5მმ ჩიპის ზომის გამოყენებით) |
||
Მეორე იდენტიფიკაცია |
Მilikiს სუბსტრატის მეორე იდენტიფიცირების ფუნქცია |
||
Მრავალსაფეხური მატრიცის ჩანერგვა |
Მilikiს სუბსტრატის მრავალსარისი მატრიცის ჩანერგვის ფუნქცია |
||
Მეორე ეკრანის ფუნქცია |
Ვიზუალურად შეგვიძლია ნახოთ მასალის წარმოების სტატუსის ინფორმაცია |
||
Ინდივიდუალური წერტილების გადართვა შეიძლება დაყოთ ნებისმიერად |
Შეიძლება ნებისმიერი კომპონენტის გადართვა და პარამეტრები მუშაობს მართვად |
||
CAD იმპორტის ფუნქციის მხარდაჭერა |
|||
Პროდუქტის გამჭრის სიღრმე |
12mm |
||
7 |
Აპარატურის უსაფრთხოება და გარემოს მოთხოვნები Гაზის სისტემა |
Აპარატის ფორმა |
Სიგრძე*სიღრმე*სიმაღლე: 840*1220*2000მმ |
Აპარატის წონა |
760kg |
||
Ძაბვის მომარაგების ბლოკი |
220AC±10%@50Hz, 10A |
||
Ტემპერატურა და ტენიანობა |
Ტემპერატურა: 25℃±5℃ |
||
Სიხშირით დაჭერილი ჰავა (ან ალტერნატიურად აზოტის წყარო) |
Ტყვის დონე: 30%RH~60%RH |
||
Ვაკუუმი |
Დაჭერვა >0.2Mpa, მოცულობა >5LPM, გამართლებული ჰავის წყარო |








Guangzhou Minder-Hightech Co.,Ltd.
Საავტორო უფლება © Guangzhou Minder-Hightech Co.,Ltd. ყველა უფლება დაცულია
 EN
EN AR
AR
 BG
BG
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 IT
IT
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LT
LT
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 ET
ET
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 GA
GA
 IS
IS
 HY
HY
 AZ
AZ
 KA
KA