Համար |
Կոմպոնենտի անուն |
Ինդեքսի անունը |
Անկախ ինդիկատորի նկարագրություն |
1 |
Շարժական պլատֆորմ |
Շարժման դիրք |
XYZ-250mm*320mm*50mm |
Կարող են տեղադրվել ապրանքների չափսերը |
XYZ-200mm*170mm*50mm |
||
Տեղաշարժման լուծում |
XYZ-0.05մկմ |
||
Կրկնվող դիրքավորման ճշգրտություն |
XY առանցք՝ ±2մկմ@3S Z առանցք՝ ±0.3մկմ |
||
XY առանցքի առավելագույն գործարանային արագություն |
XYZ=1մ/վ |
||
Սահմանափակման ֆունկցիա |
Էլեկտրոնական mięկ սահման + ֆիզիկական սահման |
||
Դարդի պտույտի միջակայքը θ առանցքով |
±360° |
||
Դարդի պտույտի լուծությունը θ առանցքով |
0.001° |
||
Հետազոտման բարձրության մեթոդը և ճշգրտությունը |
Մեխանիկական բարձրության հայտարարում, 1մկմ |
||
Պատչի ընդհանուր ճշգրտությունը |
Պատչի ճշգրտություն ±3մկմ@3S Անկյունային ճշգրտություն ±0.001°@3S |
||
2 |
Սկզբնական կառավարման համակարգ |
Դասակարգ և լուծում |
5~1500գ, 0.1գ լուծում |
3 |
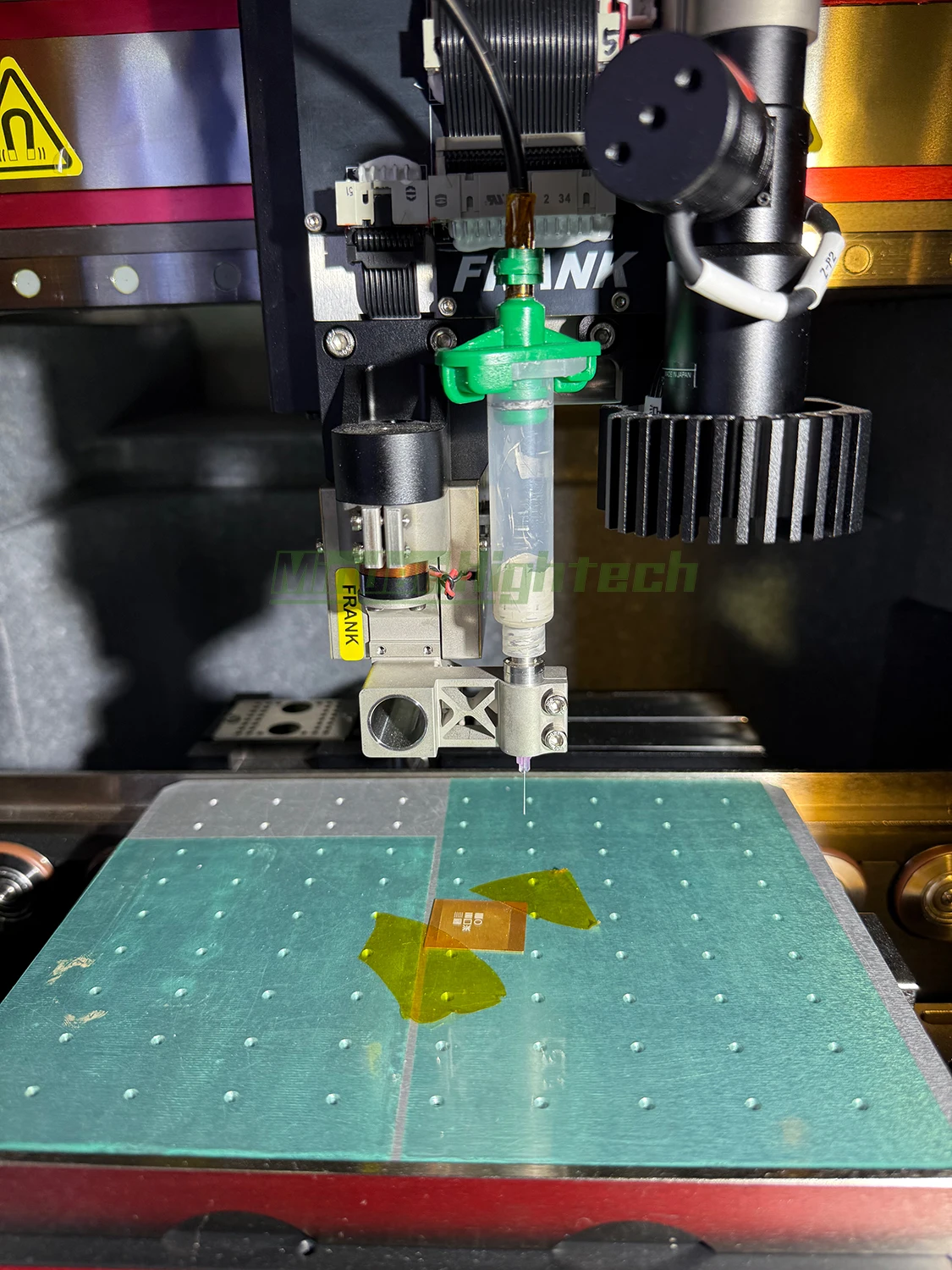
Օպտիկական համակարգ |
Հիմնական PR դիտարկիչ |
4.2մմ*3.7մմ դիտարկման դաշտ, համարեցում է 500M պիքսելներին |
Աջ ճանապարհի դիտարկիչ |
4.2մմ*3.7մմ դիտարկման դաշտ, համարեցում է 500M պիքսելներին |
||
4 |
Նոզելի համակարգ |
ԿԱՐԳԱՑՄԱՆ ՄԵԹՈԴ |
Մագնիսային + վակուում |
Նոզելի փոխարինության քանակ |
12 |
||
Նոզելների ավտոմատ կալիբրացիա և ավտոմատ փոխանցում |
Համարում է օնլայն ավտոմատ կալիբրացիայի, ավտոմատ փոխանցման |
||
Սակուր հայտնաբերման պահպանություն |
Աջակցություն |
||
5 |
Կալիբրացիայի համակարգ |
Հետևանքի դիտարկման կամերայի կալիբրացիա Սակուր XYZ ուղղության կալիբրացիա |
|
6 |
Ֆունկցիոնալ 특징ներ |
Պրոգրամային համատարածություն |
Արտադրանքի պատկերները և տեղադրման տեղեկատվությունը կարող են կիսվել դիսպենսերի մաքնին հետ |
Երկրորդ որոշման համակարգ |
Երկրորդ որոշման ֆունկցիայի կառուցման համար հիմքերի համար |
||
Բազմաշերտ մատրիցի ներդրում |
Բազմաշերտ մատրիցի ներդրման ֆունկցիայի կառուցման համար հիմքերի համար |
||
Երկրորդ ցուցադրման ֆունկցիա |
Դիտել նյութի ստեղծման վիճակի տեղեկատվությունը |
||
Անհատականության կայքերի տեղափոխումը կարող է կայացվել պատահականորեն |
Կարող է սետել ցանկացած կոմպոնենտի անհատականությունը, և պարամետրերը կարող են սետվել անկախաբար |
||
Հաջողությամբ CAD ներմուծման ֆունկցիա |
|||
Արտադրանքի գնացքի խորություն |
12մմ |
||
Սիստեմայի կապում |
Հաջողությամբ SMEMA կապի |
||
7 |
Պատկերացման մոդուլ |
Համատեղելի է տարբեր բարձրությունների և անկյունների պատկերների հետ |
|
프로그래մը ավտոմատացրեց նիստերի և կոմպոնենտների փոխանակումը |
|||
Чип-ը ընտրող պարամետրերը կարելի է մաքրել անկախաբար/դասավորությամբ |
Чип-ը ընտրող պարամետրերը ներառում են մոտենումի բարձրությունը չիպի ընտրումից առաջ, չիպի ընտրման մոտենումի արագությունը, ճնշումը չիպի ընտրում, չիպի ընտրման բարձրությունը, չիպի ընտրման արագությունը, վակուումի ժամանակը և այլ պարամետրեր |
||
Чип-ը տեղադրող պարամետրերը կարելի է մաքրել անկախաբար/դասավորությամբ |
Чип-ը տեղադրող պարամետրերը ներառում են տեղադրման առաջ մոտենումի բարձրությունը, տեղադրման առաջ մոտենումի արագությունը, ճնշումը տեղադրումից հետո, տեղադրման բարձրությունը, տեղադրման արագությունը, վակուումի ժամանակը, հետ մոլորացման ժամանակը և այլ պարամետրեր |
||
Տեղադրման հետո հետ ճշգրտանալու համար |
Կարող է համարել չիպերի հետ մոլորացման 0.2-25 մմ չափումների միջակայքում |
||
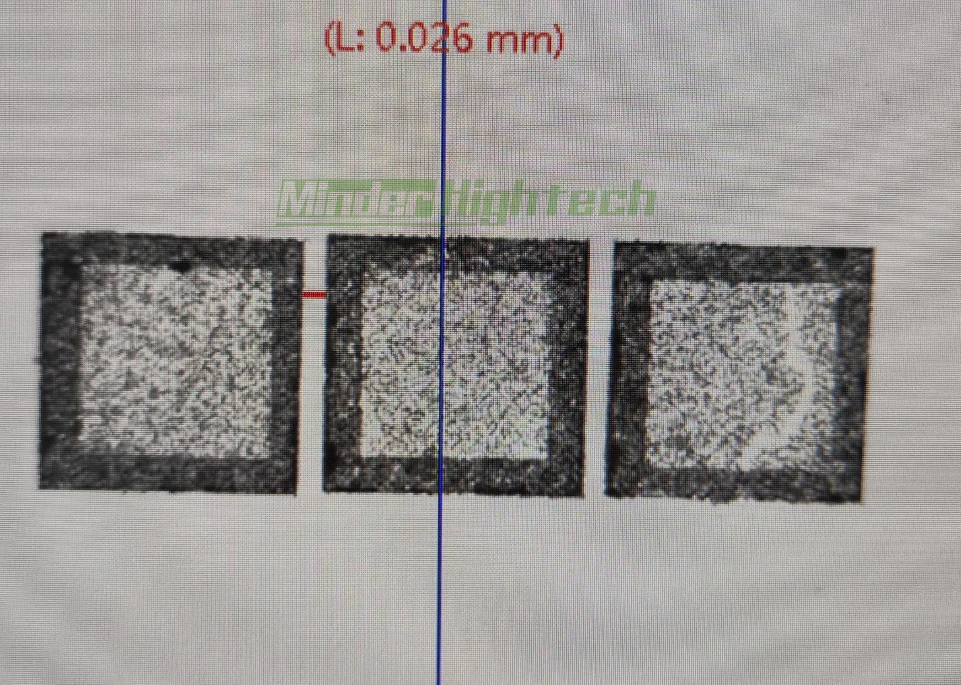
Կենտրոնական շեղումը սպիտակագույնի դիրքում |
Չափազանց 〒3մկմ@3S |
||
Արդյունավետության համար |
Չի պակաս 1500 կոմպոնենտներ/ժամ (օրինակ, սպիտակագույնի չափսի 0.5*0.5մմ-ով) |
||
8 |
Մարմնավոր համակարգ |
Համատեղելի վահանակների/գելային բացիկների քանակ |
Ստանդարտ 2*2 դյույմ 24 հատ |
Յուր տուփի հիմքը կարող է վակուում դառնել |
|||
Վակուումի պլատֆորման կարող է ձևավորվել |
Վակուումի արտագրման տիրույթը կարող է հասնել 200մմ*170մմ |
||
Համապատասխան 晶 չիփ չափսեր |
Ավելացում է գաղափարի համապատասխանության վրա Չափսերը՝ 0.2մմ-25մմ 游戏角色 Thickness՝ 30մկմ-17մմ |
||
9 |
Equipment ապահովում և միջավայրի պահպանման պահանջներ Օդային համակարգ |
Device ձևը |
Length*depth*height՝ 840*1220*2000մմ |
Մասնակի գրավիտացիա |
760Կգ |
||
Էլեկտրամատակարարում |
220AC±10%@50Hz،10A |
||
游戏角色温度 and Ẩumidity |
Temperature՝ 25℃±5℃ Humidity՝ 30%RH~60%RH |
||
Սեղմված օդի աղբյուր (կամ նիտրոգենի աղբյուր որպես համարձակ) |
Դաշնակցություն>0.2Մպա, հոսք>5ԼՊՄ, կաթարված օդի աղբյուր |
||
Վակում |
Դաշնակցություն<-85Կպա, արտահայտման արագություն>50ԼՊՄ |
N0. |
Կոմպոնենտի անուն |
Ինդեքսի անունը |
Անկախ ինդիկատորի նկարագրություն |
1 |
Շարժական պլատֆորմ |
Շարժման դիրք |
XYZ-250mm*320mm*50mm |
Հատարակվող արտադրանքների չափսերը |
XYZ-200mm*170mm*50mm |
||
Տեղաշարժման լուծում |
XYZ-0.05մկմ |
||
Կրկնվող դիրքավորման ճշգրտություն |
XY առանցք՝ ±2մկմ@3S Z առանցք՝ ±0.3մկմ |
||
XY առանցքի առավելագույն գործարար արագությունը |
XYZ=1մ/վ |
||
Սահմանափակման ֆունկցիա |
Էլեկտրոնական mięկ սահման + ֆիզիկական սահման |
||
Դարդի պտույտի միջակայքը θ առանցքով |
±360° |
||
Դարդի պտույտի լուծությունը θ առանցքով |
0.001° |
||
Հետազոտման բարձրության մեթոդը և ճշգրտությունը |
Մեխանիկական բարձրության հայտնաբերում, 1մկմ, կարելի է սետել ցանկացած կետի բարձրության հայտնաբերումը; |
||
Ընդհանուր տարածման ճշգրտություն |
±3մկմ@3S |
||
2 |
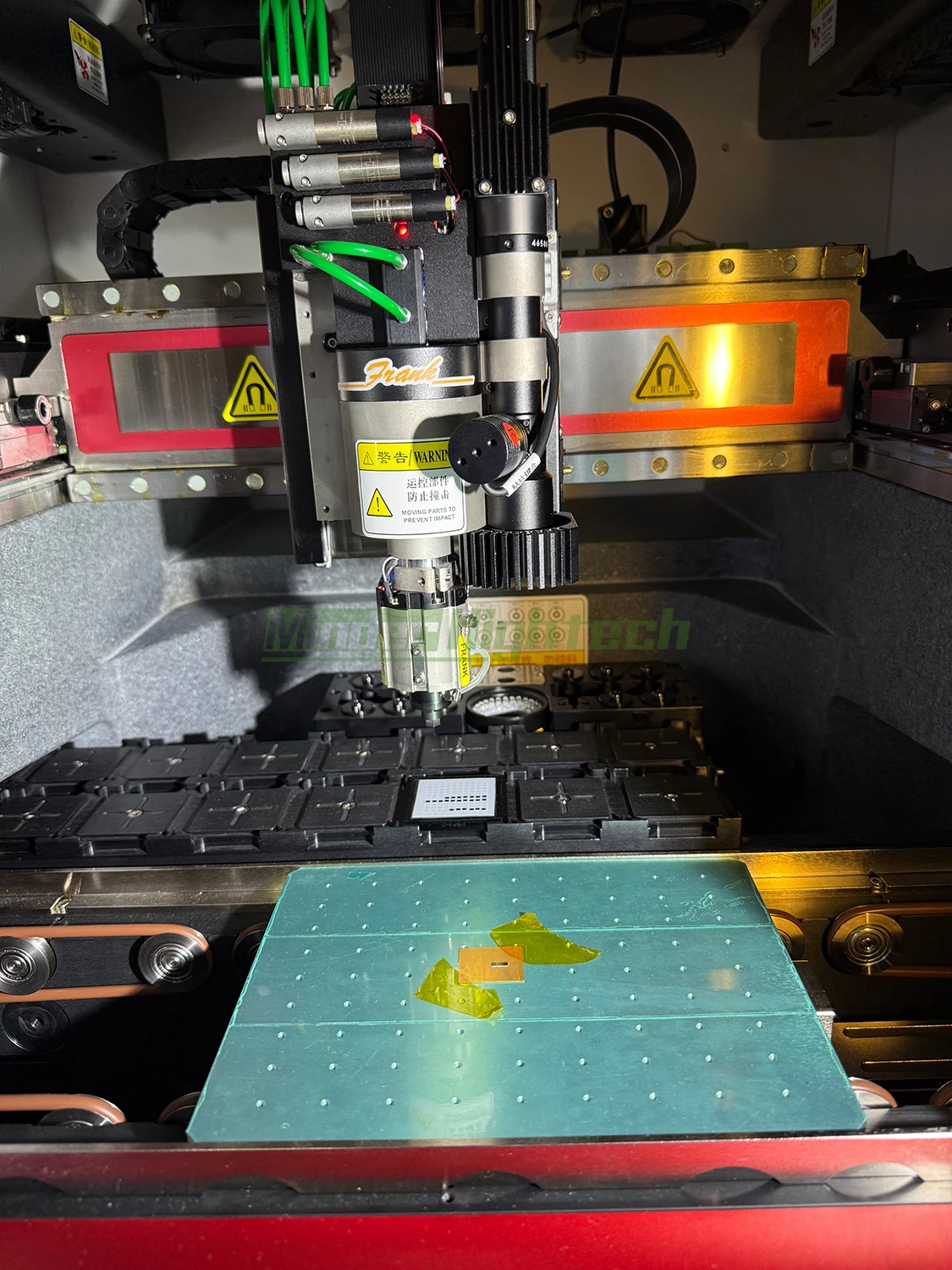
Տարածման մոդուլ |
Նվազագույն կպչիկի տրամադրություն |
0.2մմ (օգտագործելով 0.1մմ տրամադրությամբ սև) |
Երգման Ռեժիմ |
Դասավորության-ժամանակի โրդ |
||
Մեծ ճշգրիտությամբ տարածման համակարգ, կառավարման խոց, ավտոմատ կարգավորում դրական/բացասական տարածման ճնշում |
|||
Տարածման օդային ճնշման կարգավորման միջակայք |
0.01-0.6MPa |
||
Համաձայնակցում է կպչիկի ֆունկցիային, իսկ պարամետրերը կարող են կարգավորվել կարbitraryում |
Պարամետրերը ներառում են տարածման բարձրությունը, նախատարած ժամանակը, տարածման ժամանակը, նախատարած ժամանակը, տարածման ճնշումը և այլն պարամետրեր |
||
Համաձայնակցում է կպչիկի հանում ֆունկցիային, իսկ պարամետրերը կարող են կարգավորվել կարarbitraryում |
Պարամետրերը ներառում են տարածման բարձրությունը, նախատարած ժամանակը, կպչիկի արագությունը, նախատարած ժամանակը, կպչիկի ճնշումը և այլ պարամետրեր |
||
Մեծ համատարակություն դիսպենսացիայի ժամանակ |
Կարող է դիսպենսել գլյուկը տարբեր բարձրություններում գտնվող հարթությունների վրա, իսկ գլյուկի տիպը կարող է պտտվել ցանկացած անկյան վրա |
||
Պատված գլյուկի հանում |
Գլյուկի տիպի գրադարանը կարող է կոչվել և պատշաճվել առաջարկված ձևով |
||
3 |
Մարմնավոր համակարգ |
Վակուումի պլատֆորման կարող է ձևավորվել |
Վակուումային արտաքին մակերեսի միջակայքը հասնում է 200մմ*170մմ-ին |
Գլյուկի փաթեթ (ստանդարտ) |
5CC (համատարակություն 3CC-ի հետ) |
||
Նշված գլյուկի տախտ |
Կարող է օգտագործվել կետերի և գլյուկի գրաֆիկի բարձրության պարամետրերի համար, ինչպես նաև գլյուկի դիսպենսացիայից առաջ գրաֆիկի ստեղծումի համար |
||
4 |
Կալիբրացիայի համակարգ |
Գլյուկի սyrանի կալիբրացիա |
Կոլերի տարրի XYZ ուղղությունների կալիբրացիա |
5 |
Օպտիկական համակարգ |
Հիմնական PR դիտարկիչ |
4.2մմ*3.5մմ դիտարկման դաշտ, 500M պիքսել |
Հավաքիչ/կոմպոնենտի ճանաչում |
Կարող է ճանաչել ընդհանուր հավաքիչները և կոմպոնենտները, իսկ հատուկ հավաքիչների համար կարելի է գերազանց ճանաչման ֆունկցիա պատրաստել |
||
6 |
Ֆունկցիոնալ 특징ներ |
Պրոգրամային համատարածություն |
Արտադրանքի պատկերները և տեղադրման տեղերի տեղեկատվությունը կարող են կիսվել տեղադրման մաքնին հետ |
Կենտրոնական շեղումը սպիտակագույնի դիրքում |
Չափազանց 〒3մկմ@3S |
||
Արդյունավետության համար |
Չի փոքր 1500 կոմպոնենտ/ժամ (օրինակ, 0.5*0.5մմ սանդվիչի չափի դեպքում) |
||
Երկրորդ որոշման համակարգ |
Երկու մակարդակի հավաքիչի ճանաչման ֆունկցիա ունի |
||
Բազմաշերտ մատրիցի ներդրում |
Ենթադրում է հավաքիչի միավորման միջակայքի բազմաշեր մատրիցի ներդիրում |
||
Երկրորդ ցուցադրման ֆունկցիա |
Դիտել նյութի ստեղծման վիճակի տեղեկատվությունը |
||
Անհատականության կայքերի տեղափոխումը կարող է կայացվել պատահականորեն |
Կարող է սետել ցանկացած կոմպոնենտի անհատականությունը, և պարամետրերը կարող են սետվել անկախաբար |
||
Հաջողությամբ CAD ներմուծման ֆունկցիա |
|||
Արտադրանքի գնացքի խորություն |
12մմ |
||
7 |
Equipment ապահովում և միջավայրի պահպանման պահանջներ Գազային համակարգ |
Սարքի ձև |
Length*depth*height՝ 840*1220*2000մմ |
Սարքերի կշիռը |
760Կգ |
||
Էլեկտրամատակարարում |
220ՎԱС±10%@50Հց, 10Ա |
||
游戏角色温度 and Ẩumidity |
Temperature՝ 25℃±5℃ |
||
Սեղմված օդի աղբյուր (կամ նիտրոգենի աղբյուր որպես համարձակ) |
Humidity՝ 30%RH~60%RH |
||
Վակում |
Դաշնակցություն>0.2Մպա, հոսք>5ԼՊՄ, կաթարված օդի աղբյուր |








Guangzhou Minder-Hightech Co.,Ltd.
权 © Գյուանգզու Մինդեր-Հայտեխ Կո.,Լտդ. Բոլոր իրավունքները պաշտպանված են
 EN
EN AR
AR
 BG
BG
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 IT
IT
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LT
LT
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 ET
ET
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 GA
GA
 IS
IS
 HY
HY
 AZ
AZ
 KA
KA