EN
EN AR
AR
 BG
BG
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 IT
IT
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LT
LT
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 ET
ET
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 GA
GA
 IS
IS
 HY
HY
 AZ
AZ
 KA
KA


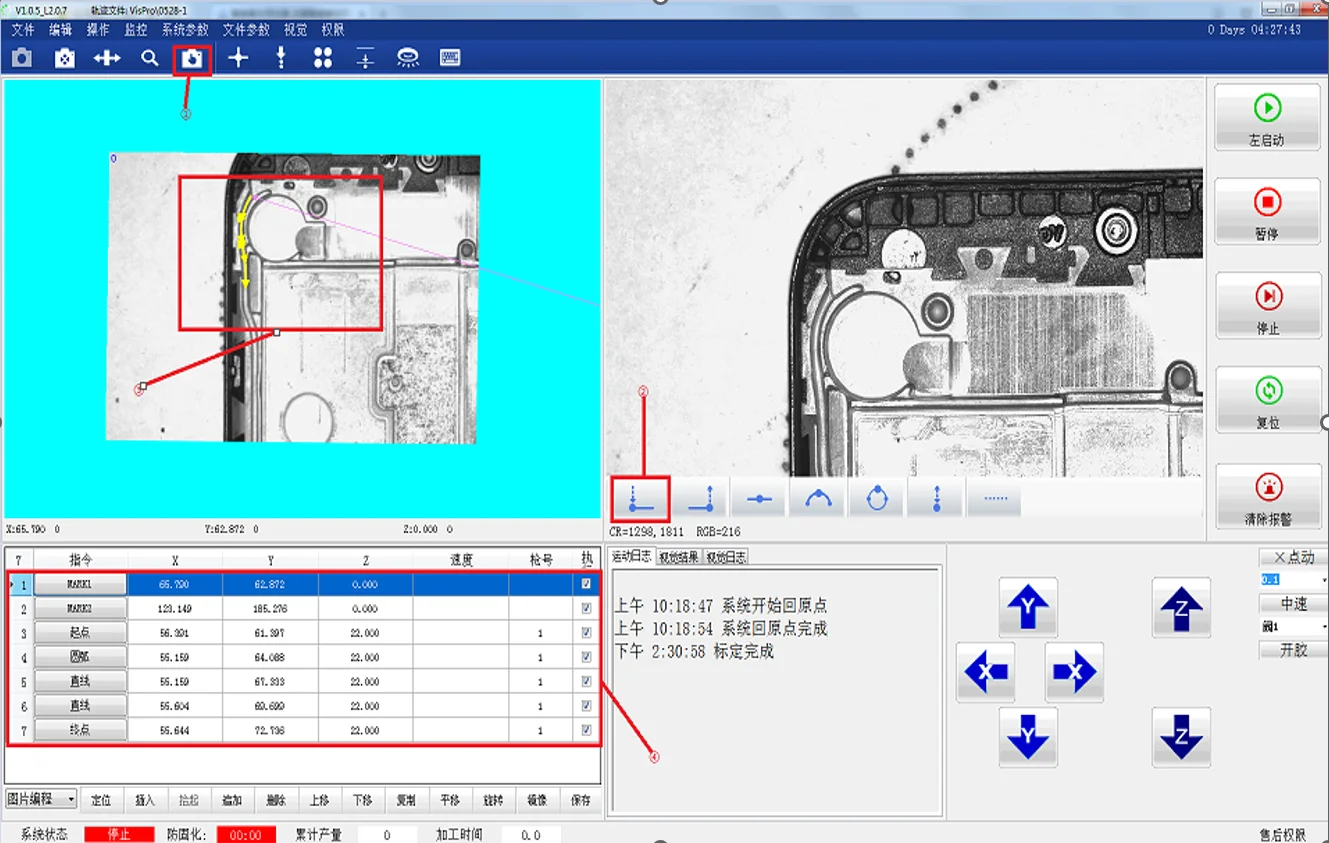




1. Støtter flere metoder for visuell posisjonering og justering, inkludert posisjonering ved én MARK, posisjonering ved to MARK-er, posisjonering ved tre MARK-er og posisjonering i lokal område;
2. Støtter ulike visjonsfunksjoner, som formmatching, sirkelmaching, oppdagelse av manglende plater, oppdagelse av flyvende punkter og bildeinnfangst i sanntid.